






Tutti i moderni veicoli e velivoli necessitano di un vasto numero di strumenti e sensori per svolgere diversi compiti nel campo di battaglia; tra questi dispositivi troviamo, per esempio, l’anemometro per la misura delle condizioni atmosferiche, il telemetro per calcolare la distanza da un dato obiettivo o anche i moderni GPS per il calcolo esatto della posizione sul globo terrestre. Tra questi sensori troviamo anche il giroscopio.
Il problema principale di questi strumenti è spesso l’impossibilità di fornire dati in particolari condizioni climatiche o in luoghi avversi, come per esempio il GPS che non mostra alcuna informazione durante operazioni in luoghi remoti senza copertura satellitare o a causa di disturbi elettronici. Come fa allora un veicolo o un velivolo a proseguire fino all’obiettivo prefissato?
Per ovviare a queste problematiche spesso si fa uso di sensori elettro-meccanici, i cosidetti MEMS (MicroElectroMechanical System), che svolgono funzioni ausiliarie qualora sistemi più complessi (in questo caso il GPS) non funzionassero più.
Uno dei più comuni MEMS che si può trovare in commercio al prezzo minimo di 10 € è il Giroscopio, spesso denominato Gyro (da Gyroscope, in inglese).
Il giroscopio è solo uni dei tanti sensori che prendono il nome di MEMS. Tra i più comuni sensori troviamo l’accelerometro, il magnetometro, il piezometro, ecc.
Per MEMS quindi si intende un dispositivo elettronico che sfrutta fenomeni meccanici per rilevare variazioni dell’ambiente esterno e convertire questi cambiamenti in segnali digitali che ovviamente dovranno essere interpretati tramite microcontrollori.
COME FUNZIONA IL GIROSCOPIO
Quando le ruote della macchina girano, stanno effettuando una rotazione intorno ad un precise asse; la velocità di rotazione intorno ad un certo asse è definita velocità angolare che si calcola in °/s (gradi al secondo) oppure in altre unità come RPS (Round per Second), RPM (Round per Minute) o rad/s.
Il giroscopio è un sensore che misura il moto rotazionale: se collegassimo un gyro alla ruota dell’immagine precedente potremmo misurare la velocità angoloare dell’asse. Se per esempio la ruota girasse completamente in 1 secondo avremmo la velocità angolare di 360 °/s.
Ovviamente nel caso precedente abbiamo 1 solo asse, per tale motivo il giroscopio misurerebbe solo questo asse. Se avessimo un sistema più complesso, come per esempio un aereo, avremmo 3 assi differenti (X,Y e Z), ognuno con una precisa velocità angolare.
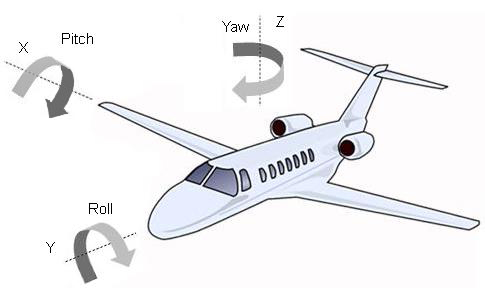
Il giroscopio quindi rileva delle minime variazioni della velocità angolare di un dato oggetto: un aereo che ruota di pochi gradi su un certo asse verrà rilevato con facilità dal giroscopio di bordo, così da aiutare i piloti nella stabilizzazione del velivolo.
L’operazione di calcolo della velocità angolare in un giroscopio avviene grazie a piccole masse (si parla di dimensioni microscopiche, tra 1 e 100 micrometri) che si muovono in funzione di cambiamenti nella velocità angolare. Queste minime variazioni vengono convertite in tensioni elettriche, amplificate e elaborate da un microcontrollore.
FUNZIONAMENTO DEL GIROSCOPIO CON ARDUINO
La trattazione seguente è puramente matematica ma è richiesta per poter effettuare una qualunque rilevazione dei dati sperimentali che un giroscopio fornisce. Di seguito una prima trattazione matematica “poco complessa” per spiegare in sintesi la trattazione successiva (molto più complessa).
Il compito di un giroscopio è si quello di calcolare la velocità angolare, ma spesso ci interessa più l’angolo che la velocità!
I seguenti passaggi matematici vogliono evidenziare come il calcolo dell’angolo in gradi (°) sia molto complicato. Se facessimo girare una ruota con una certa velocità angolare (velocità che noi conosciamo a priori), basterebbe calcolare il tempo trascorso tra l’inizio e la fine del giro per conoscere l’angolo che abbiamo percorso; infatti per calcolare i gradi (°) basta moltiplicare la velocità angolare (°/s) per i secondi (s) trascorsi.
Il problema è che la velocità angolare calcolata dai sensori elettronici è un valore che viene continuamente fornito dal dispositivo, millesimo in millesimo di secondo, quindi non è un valore che conosciamo a priori ma ci viene dato in modo costante; per tale motivo dobbiamo “eliminare” alcuni valori rilevati e prendere solo una sequenza ciclica di valori della velocità angolare in un intervallo di tempo stabilito (per esempio ogni 10 millisecondi). Con questo “trucco” siamo in grado di calcolare in modo approssimativo l’angolo, ma commetteremmo degli errori poichè il giroscopio rileva variazioni di velocità angolare anche durante il periodo tra un intervallo di tempo stabilito e l’altro!
(La seguente trattazione contiene passaggi matematici che richiedono una minima conoscenza sulla derivazione e l’integrazione)
Come affermato in precedenza, il giroscopio misura la velocità angolare; a livello fisico avremo quindi:

Quindi se dovessimo calcolare la posizione angolare in modo continuo dovremmo effettuare questa integrazione:
 Il problema dei sistemi digitali è l’impossibilità di effettuare un’integrazione continua, pertanto va effettuata una sommatoria di un numero finito di velocità angolari calcolate entro un intervallo temporale costante Ts, da cui:
Il problema dei sistemi digitali è l’impossibilità di effettuare un’integrazione continua, pertanto va effettuata una sommatoria di un numero finito di velocità angolari calcolate entro un intervallo temporale costante Ts, da cui:

Ovviamente l’approssimazione introduce errori poichè se i valori letti dal giroscopio cambiassero più velocemente dell’intervallo temporale costante, non potremmo individuarli e quindi accumuleremmo un errore nella rilevazione finale dell’angolo. Questo errore è definito drift.
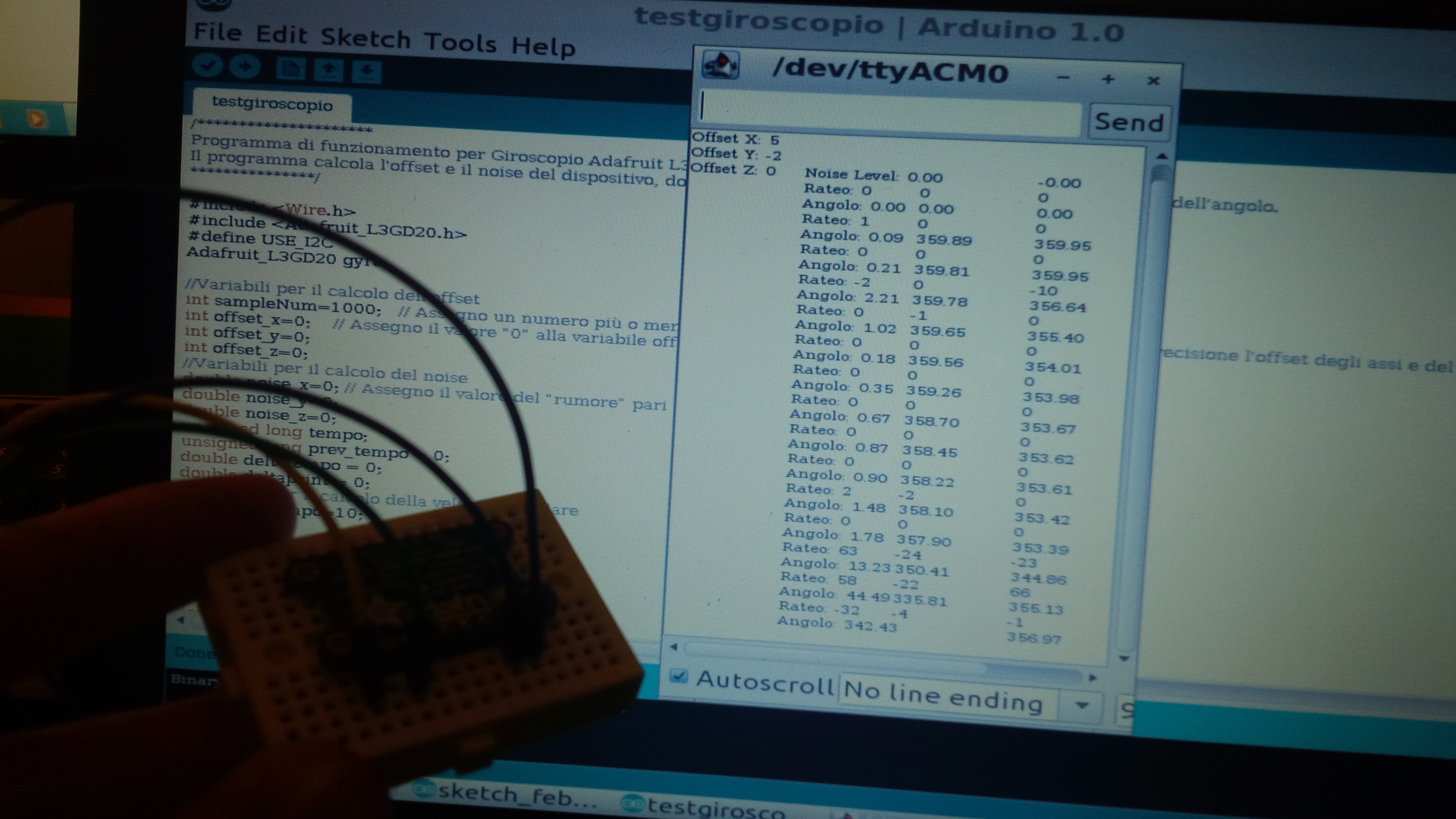
Tramite Arduino (con microcontrollore Atmega328) è possibile tradurre la trattazione matematica in un output che ci fornisce i 3 angoli (dei 3 assi principali) ma con relativo errore dovuto all’approssimazione.
Pertanto possiamo notare come un semplice dispositivo (poco costoso e piccolo) può svolgere un compito non solo ausiliario ma principale nell’uso di un veicolo o di un velivolo.
Un veicolo che non può più orientarsi tramite GPS può continuare a viaggiare sulla rotta esatta tramite un’insieme di sensori (definiti con il termine di Fusion Sensor) che permettono l’orientamento sulla carta con un margine di errore molto piccolo. Mentre dispositivi più complessi sono spesso influenzati in modo rilevante dall’ambiente ostile in cui si opera, i MEMS possono svolgere il loro compito anche in condizioni climatiche avverse; ovviamente i MEMS in commercio variano da prezzo a prezzo insieme alle loro caratteristiche (acuratezza, possibilità di utilizzo in ambienti ostili, ecc)
Fonti:
Corso individuale su Arduino e Sistemi inerziali
http://www.pieter-jan.com/node/7
https://learn.sparkfun.com/tutorials/gyroscope

 in grado di calcolare la velocità angolare){kind=link}
Tratto dall’articolo: “come per esempio il GPS che non mostra alcuna informazione durante operazioni in luoghi remoti senza copertura satellitare”
Per come è concepito il GPS, non esistono luoghi sulla terra non coperti dal segnale
Non so lei, ma io ho un GPS e le posso assicurare che in molti casi non sono stato in grado di avere la mia posizione sul globo a causa della mancanza di ricezione. Certamente dipende dal dispositivo usato ma anche dal luogo in cui siamo. Sottoterra un GPS non funziona..
…esistono molti luoghi sulla terra dove il satellitare non funziona, per un semplice motivo, i 13.000 satelliti in orbita non esistono !
tutto avviene con un sistema di triangolazione di antenne su base terrestre !
highlander, Kowak parlava di a-gps che si basa non sui satelliti ma sulla rete GSM-UMTS.
io sono stato in tanzania, e lì antenne non ce n’erano. eppure il gps funzionava benissimo.
Certo, se andiamo a vedere ogni tipologia di sistema basato sul GPS non finiamo più 😛 io comunque mi sono sempre riferito a casi non troppo rari in cui non c’è campo, a prescindere dal sistema usato.
Non confondiamo le cose… come prima cosa, come diceva Massimo, non esistono zone SCOPERTE dove il segnale GPS non è presente. Ovvio che in un ascensore o in cantina non funziona, ma evitiamo le banalità. 🙂
I satelliti in orbita sono 24 funzionanti, con altri 3 di scorta, su sei piani orbitali differenti, ogni zona della terra è in grado di vedere almeno 5 satelliti in ogni istante (ovviamente senza ostacoli alti che cambiano la visibilità dell’orizzonte). Ricevendo 3 satelliti si ha la posizione, ricevendo il quarto si valuta anche l’altitudine. Per come sono realizzate le orbite, bastano questi satelliti, non servono 13.000…
Non esiste triangolazione con antenne su base terrestre. I sistemi terrestri servono solo a controllare la rete dei satelliti GPS, ma la triangolazione avviene tra il ricevitore GPS che vuole sapere dove si trova, e almeno 3 satelliti GPS. Possono esserci tempi lunghi per il fixing quando si accende un ricevitore per la prima volta in quella zona, oppure dopo averlo tenuto spento per lungo tempo.
Il sistema A-GPS utilizza SEMPRE i satelliti, dato che è un sistema GPS Assistito.
Basta farsi un giro su internet per avere maggiori informazioni, per esempio Wikipedia:
“L’idea di fondo è la seguente: dato che ogni cella di telefonia mobile presente sul territorio ha una posizione fissa, si fa in modo che sia la cella a ricavare quali siano i satelliti GPS a essa in vista, istante per istante. Quando un terminale A-GPS vuole conoscere la sua posizione, si collega tramite la rete cellulare a un Assistance Server (che può anche essere gestito dall’operatore stesso), al quale viene inviata anche l’informazione sulla cella a cui l’utente è agganciato. Dato che sono noti i satelliti in vista alla cella, si può assumere ragionevolmente che anche il terminale A-GPS veda i medesimi satelliti. Pertanto il server elabora una lista con i satelliti in vista, e la invia attraverso la rete cellulare al terminale, che in questo modo sa già a quali satelliti potrà collegarsi e quindi ricava la propria posizione da essi.”
Senza A-GPS cambiano in modo notevole i tempi di fixing della posizione.
Scusate tutti parlo da ignora,voglio precisare solo dei minimi concetti:
1)il GPS è tridimensionale e sbaglia 5/6m.ma attenzione parliamo del GPS americano,ricordo che una volta doveva essere attivato il GPS europeo,più preciso non so se funziona oppure a grave scoperture territoriali,come presumo.
2)la cella umts o lt e tridimensionale anche questa nella posizione fissa.
3)Apparentemente i due sistemi sarebbero concorrenziali,eppure è evidente che se un server addetto avesse un apposito software di gestione potrebbe fondere i due sistemi proprio a coprire il territorio.
Con il criterio che il giroscopio e altre apparecchiature possano passare da un sistema(gps e umts)a un altro come quando con il cellulare passiamo da una cella a un’altra.
No,perché entrambi i sistemi avranno sempre aree scoperte,ma statene certi